19 June 2019 / Garrett Summerfield / 0 Comments
Our code from previous years is now public. This used to be tracked with a single flash drive, however with the transition to GitHub and source control, its now available publicly for anyone to view.
There is no version control and there is little documentation in areas, and there is no maintenance done to the code outside of organization and uploading to GitHub.
To view: https://github.com/OakvilleDynamics/ohsrobotics-archive to browse around.
Our other GitHub repos are also generally available!
18 October 2018 / Jacob Walters / 0 Comments
It’s been awhile since our last post so we wanted to take this time to tell everyone how this year has been starting off. We started off this year with our first meeting on the 23rd of August, where we elected new executives and welcomed our new members. On the 8th of September we learned our new theme for the game this year, which is called Rover Ruckus. This year its completely different than any other year and is the most complex it has been in a long time. The sponsorship and fundraising scene is also different as other years. We’ve planned for different levels of sponsorship based on how much is given. (Those levels will be finalized and posted onto this website later in the Month) Along with a new face to the Sponsorship’s, the teams have been looking into different Colleges and creating part lists for our existing partners to fulfill. In the end, we look to have a great year for Robotics and have a bright future. Till next time!
22 November 2017 / Tommy Dong / 0 Comments
This year has been hectic for a majority of the Robotics veterans, many who are juniors and seniors starting to take on more responsibilities in and out of the club. We’ve gone through a bit or reorganization and have focused a significant amount of our efforts on fundraising in a joint effort this Robotics club and Oakville’s Technology Students Association (TSA) club. A big priority for us was to make sure that the newer members wouldn’t be disadvantaged as us seniors will have to depart from the team once we graduate.
Our coach, Dr. Kreyling, had to consolidate all his classes and clubs into a single room. He runs most of the school’s PLTW engineering courses and oversees the robotic club, TSA, and Oakville Key Club, so it was fairly difficult to suddenly have less than half the space for everything. But some of our robotics members, including me, helped him compact everything that was needed into and room. Despite the ordeal we actually now have a great advantage just from how well organized everything is. Dr. Kreyling’s room is still quite large, although I wish there was a sink in here to wash our hands periodically.
For the fall season we now have new executive positions and team captains. Here’s the list.
President: Thomas Gleiforst
Vice-president: Alisa Lazareva
Secretary: Nicole Neher
Public relations: Hannah Jokuti
Media Specialist: Tommy Dong
Team 9328 Captain: Sheldon Salins
Co-captain: Joseph Baltz
Team 9612 Captain: Nick DeLucia
Co-captain: Nate Pruitt
With new and old executives and team members and a more organized club, the two teams have been working on their respective designs and robots. Expect new updates from both teams as well as some photos and videos from me about some of the stuff we’ve done this year.
Also, here’s a short video of a few of us working on a Robotics float for Oakville’s homecoming parade (you can skip the end where it stops being robotics related). Enjoy!
https://youtu.be/Yot1SRmB-OY
20 January 2017 / Thomas Gleiforst / 0 Comments
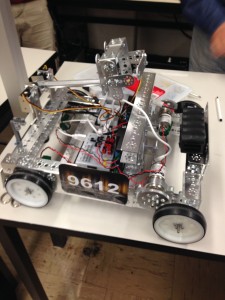
Team 9612 has been very successful this year, placing 4th in our first meet at Lutheran High School in St. Charles. Our original concept was a robot that would use a scissor lift to raise the yoga ball on top of the vortex, two wheels with weather stripping to suck balls in, and two wheels to launch them up a curved ramp into the center vortex. At the first meet, none of that happened; we had a scissor lift, but it was unreliable, needing way too much fixing that we didn’t have time for. We just played “the beacon game,” and managed to place 4th.
Between that meet on 12/10/16 and our first qualifier on 1/7/17, we made a lot of massive changes. For starters, we decided that Tetrix parts were too unreliable, so, with Dr. Kreyling’s guidance, we made almost the entire robot out of steel. Now, the scissor lift works beautifully. The suck mechanism looked like it would work, but it was a little iffy. When we got to the qualifier, we found a number of problems. The arms to pick up the yoga ball got stuck nearly every time, so we weren’t able to cap the vortex in any of our matches. Our ball collection mechanism just flat out didn’t work, so we scratched that too. Again, we just played the beacon game. We placed 6th overall, and we were the 3rd place Alliance Captain’s first round pick. Our alliance lost every game, but it was a the best an Oakville Robotics team has ever done.
Now, we are preparing for our second meet tomorrow. The scissor lift works perfectly, now featuring double motors with double the torque, so it should be way faster too. Our ball collection and shooting mechanism is nearly completed, but we will update with the specifics on that after our competition tomorrow. We are currently in 16th place in the NE Division, and the top 18 advance to the Conference Qualifier in Rolla, so we are hoping to do great at this meet, securing ourselves a position at that qualifier.
20 January 2017 / Thomas Gleiforst / 0 Comments
We’re back! This website has been down a long time, so we’ve got a lot to to catch up on!
The biggest change this year is that we are under new management, with Dr. Jim Kreyling as our coach. This has definitely brought some changes to the club, especially with the organization of the club. We elected a president (Thomas Gleiforst) and a vice president (Sheldon Salins) as we always do, but this year they are not the team captains. We also elected 3 other executives to help the club run more smoothly. The positions are as follows:
President: Thomas Gleiforst
Vice President: Sheldon Salins
Secretary: Nicole Neher
Treasurer: Hannah Jokuti
Communications Officer: Caleb Roth
Team 9612 Captain: Lukas Shelp
Team 9612 Co-captain: Nick DeLucia
Team 9328 Captain: Alisa Lazareva
Team 9328 Co-captain: Max Buckel
There should be a post up about each team later today, and hopefully the website will be continuously updated from this point forward. We’re happy to be back on the web to share our progress with the world again, so we are trying to keep this updated for the rest of the year.
11 January 2016 / Alisa Lazareva / 0 Comments
Although there hasn’t been much coverage of Team 9612, the other robotics team has made plenty of progress!
When the FTC 2015-2016 game had come out, Team 9612 went straight to work, generating ideas for a robot that could climb all three levels of the mountain while hitting the triggers along the way, as well as pull up on the top bar. Some suggestions of picking up trash (wiffle balls and cubes) were quickly dismissed, as our team wanting to focus on the more challenging part of the game instead of the seemingly simple tasks.

One of Team 9612’s members gathering up all the different designs into one to get an initial idea of their robot.
Our first idea for an arm using drawer channels
After drawing up the designs, all 8 members at the time began creating our base. The base was crafted using the directions in the PushBot Design Guide that was provided to us through the FTC website. Making sure we remained within the 16x16x16 constraints, we also began generating ideas for an arm that would grab the pullup bar and lift the robot up. Using Youtube, certain members researched arm ideas to give us inspiration for how our bot arm would work.
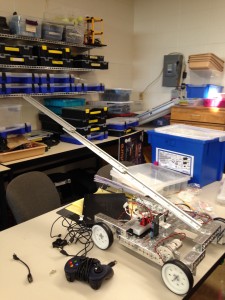
Our first prototype used surgical string to extend out fully, but our team could not come up with an idea to the arm to pull the robot up. Running out of time and ideas, our mentor Brian Pohl gave a suggestion. Why not focus on the trash and after the first qualifier, develop the extending arm idea further. We set to work on designing a new arm that would grasp the trash and bring it up to the first basket. Unfortunately we did not have time to program an autonomous mode for the bot.
Final arm idea
With the whole robot working properly, we went to our first FTC qualifier on December 5th, 2015, getting 16th place overall. While at the competition, our program “hiccuped” a bit, making our wheels spin without us touching the controllers. We eventually had to switch out our power distribution module with a backup one from FTC due to a defect. The gears also slipped while we were competing. To improve our bot for the next competition, we plan on taking the gears off our bot and changing to treads. Also, we will update our code for the bot and create an autonomous mode.
Stay tuned for an update from our other team.
6 January 2016 / Jacob Kauffmann / 0 Comments
We’re proud to say that we placed 4th in the first Missouri FTC qualifier!
Our goal for this specific competition was just to check measurements and see if our bot has the potential of climbing the mountain. Our first round and first attempt to climb the mountain resulted in one of the gears in the robot to come loose and fall off which caused one of the gear trains to not function anymore. This was due to the fact that we combined Vex and Tetrix parts, but this problem was solved by switching out the axles. Even though the gear train did not fall apart anymore from then on, we still needed to tighten all the wheels after every match, as some of them continued to come loose.
We found that our robot, like many, was having trouble getting up the first incline, especially without tipping over. Occasionally, we would be able to cross over the first bar by driving the robot straight into it, but it was too unreliable to depend on. However, the team improvised and attached a piece of sheet metal to the front of the bot to push balls and cubes around on the field. This allowed the team to score some points but raised the problem of not being able to make it up the mountain. This was easily solved by having the robot go backward up the ramp instead of forward, so the sheet metal didn’t hit the ground. When combined with good preliminary alliance partners, these improvised design ideas allowed us to qualify for the finals round. Because the third team in line was picked to be a finals alliance partner, we were made an alliance captain. We chose the other Oakville team (9612) as well as team 8782.
As time went on we began to notice that many teams were using treads, with varying degrees of success. From what we observed, other teams also used wheels, but to a lesser extent. The specific choice of wheels also tended to be larger than our own. On the field, one of the other teams skipped the bars and parking zones altogether by using an extending arm. With everything we observed at the qualifier, we decided that treads were useful for our plan of climbing the mountain, and plan to implement them in our robot’s design.
Stay tuned for an update from our other team.
10 November 2015 / Jacob Kauffmann / 0 Comments
Hello, robotics fans! Over the past month, both FTC teams have been working on their robot bases. Today, we’ll be taking a look at Team 9328’s progress.
After unpacking the parts so we could measure and reference them, we needed to start designing. Because we have so many members this year, it was difficult for everyone to contribute to the design. To solve this, we let everyone draw their own designs for the base and subsystems of the robot, and we then collected everyone’s drawings and picked out the drawings that were most detailed and most promising. Several members of our team (including, but not limited to, Emily, Katelyn, and Hannah) then drew out final designs that combined our favorite aspects of each design.
For our base, we made a rectangle out of Tetrix c-channel. We used the longest available pieces for the sides, and for the front and back, Michael bolted together several smaller pieces. Jack and Max put together a wheel and axle assembly, and I calculated how wide the front and back could be in order to fit within the 18″ size constraint. Currently, some of us are in the process of attaching the motors to the gears for the wheels, and others are attaching the arm mount.



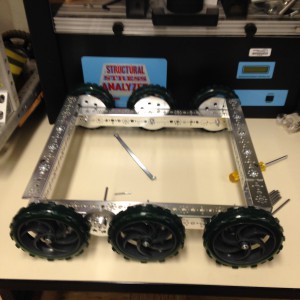
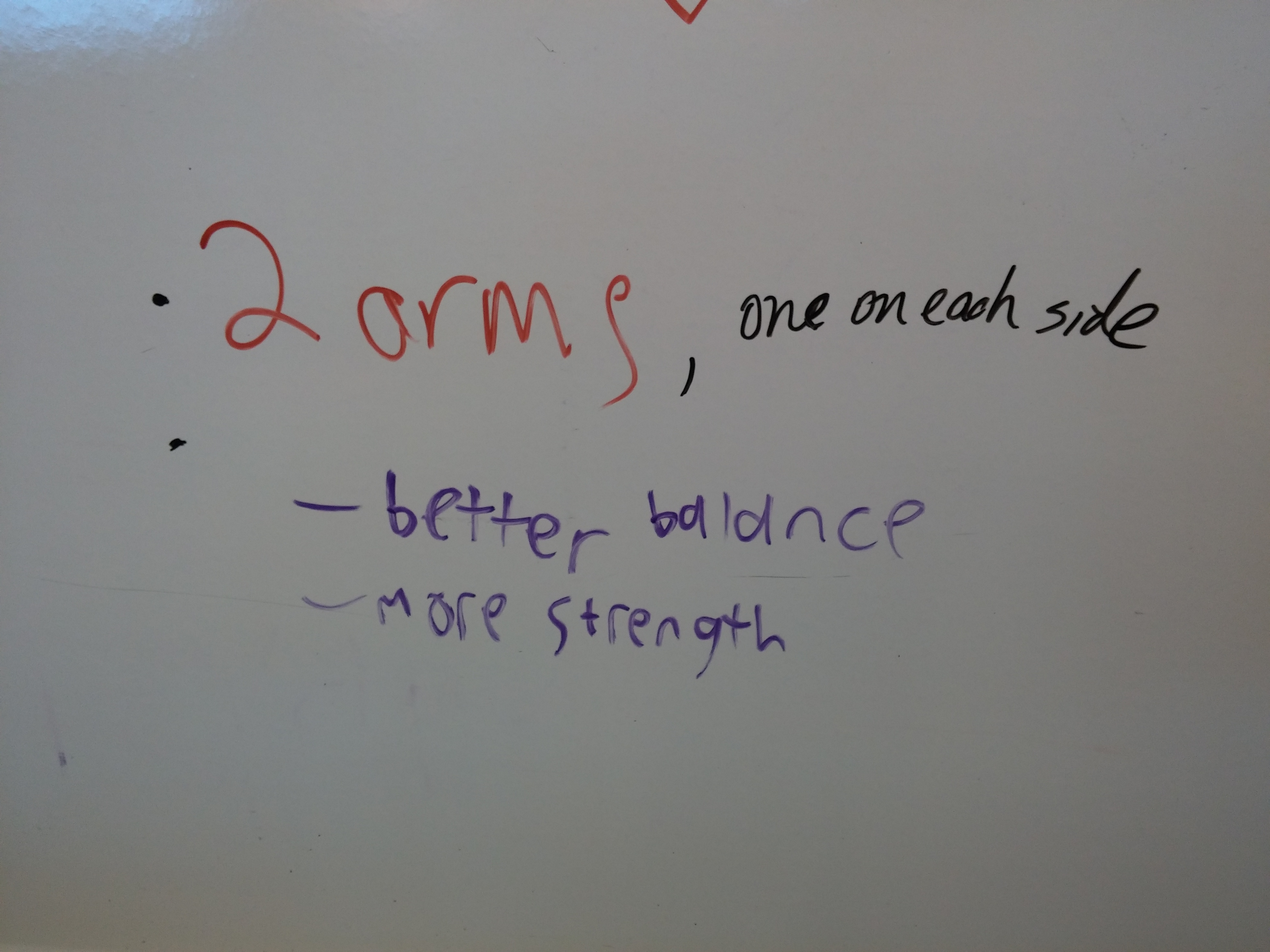
Speaking of the arm, we’ve settled on a folding design. We will attempt to use Tetrix servos to connect each link to the next. It’s worth noting that we’re not completely confident in the servos’ ability to lift the robot off the ground, so we’re looking into alternative options in case we need them. For now, the plan is to have two identical arms working at the same time, connected at the far end with a stick. On that stick, we will attach a carabiner, which will clip onto the cliff bar on the playing field. When the arms fold back up, the robot should be pulled off of the mountain.
In the coming weeks, we will finish the base and the arm mechanism. We will post another update once we’ve moved on to programming and autonomous functions.
1 October 2015 / Jacob Kauffmann / 0 Comments
During our 9/30 meeting, our FTC teams split up and discussed the 15-16 game, Res-Q.
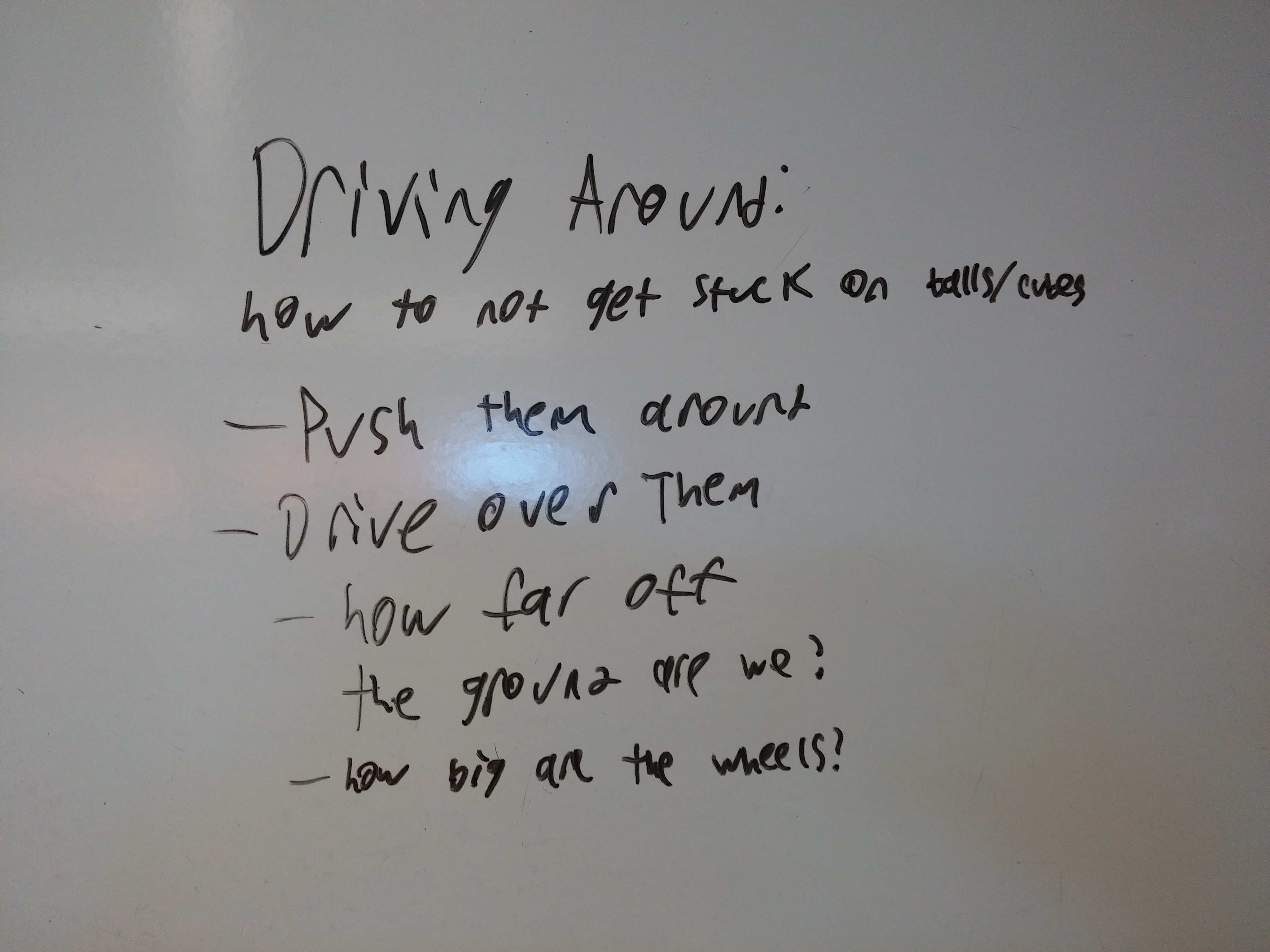
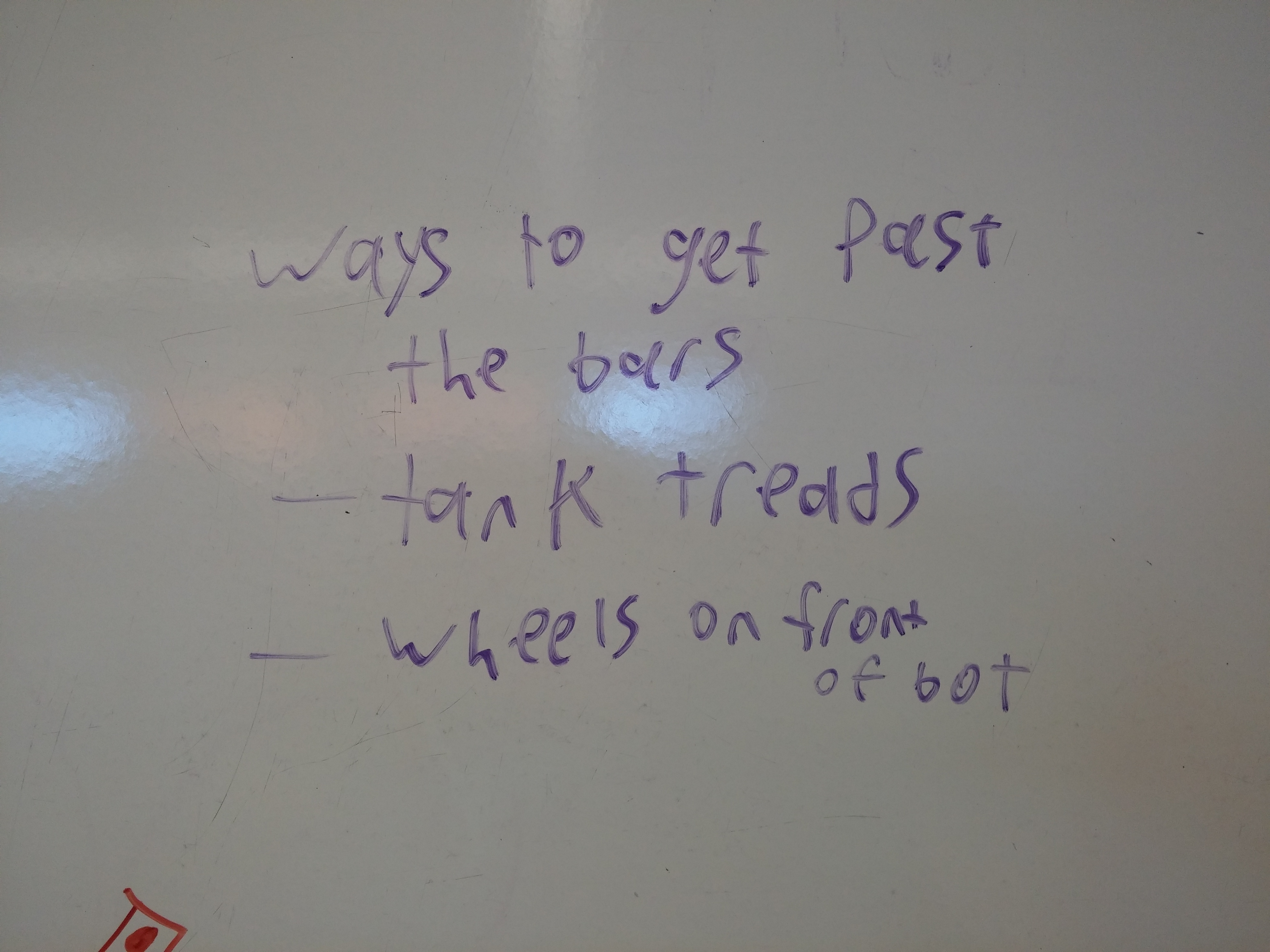
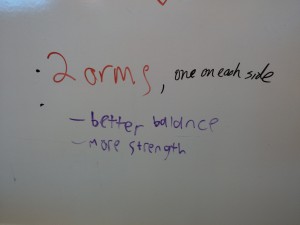
Team 9328 talked about the various methods of scoring points, and decided that it wants to attempt pushing the colored buttons in autonomous mode and climbing the cliff during the driver-controlled period. Here are some of the early notes:
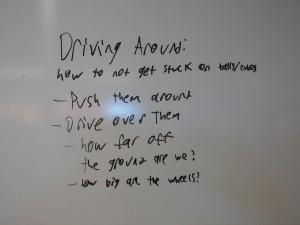
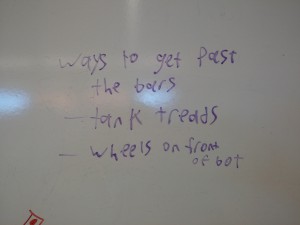
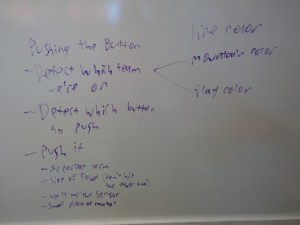
Next meeting, we’ll unpack the parts (assuming we get them) and continue to design based on the parts we have.
1 October 2015 / Jacob Kauffmann / 0 Comments
At our 9/23 meeting, we split the club up into two teams for the FTC. As of this post, the teams are as follows:
Team 9328
Jacob Kauffmann * (Captain)
Emily Francis
Jack Liu
Sheldon Salins
Michael Chenot
Max Buckel *
Justin Shotton
Katelyn Hopkins
Hannah Jokuti
Team 9612
Drake Follmer * (Captain)
Alisa Lazareva
Caleb Roth
Thomas Gleiforst
Lukas Shelp
Shane Murphy *
(This list was updated 13 December 2015.)
Members marked with the * symbol were in the club last year.
To create the teams, we assigned everyone a sequential number, then used a random number generator to pick numbers for each team. We then marked each name as a builder or programmer (based on each member’s reported interests) and made swaps until the teams were roughly equal in size and type.
Note that we are no longer using the “Team A/Team B” naming structure. To avoid negative connotations (and bad luck), we’re referring to the teams by their official FTC numbers this year.