FTC October Progress
Hello, robotics fans! Over the past month, both FTC teams have been working on their robot bases. Today, we’ll be taking a look at Team 9328’s progress.
After unpacking the parts so we could measure and reference them, we needed to start designing. Because we have so many members this year, it was difficult for everyone to contribute to the design. To solve this, we let everyone draw their own designs for the base and subsystems of the robot, and we then collected everyone’s drawings and picked out the drawings that were most detailed and most promising. Several members of our team (including, but not limited to, Emily, Katelyn, and Hannah) then drew out final designs that combined our favorite aspects of each design.
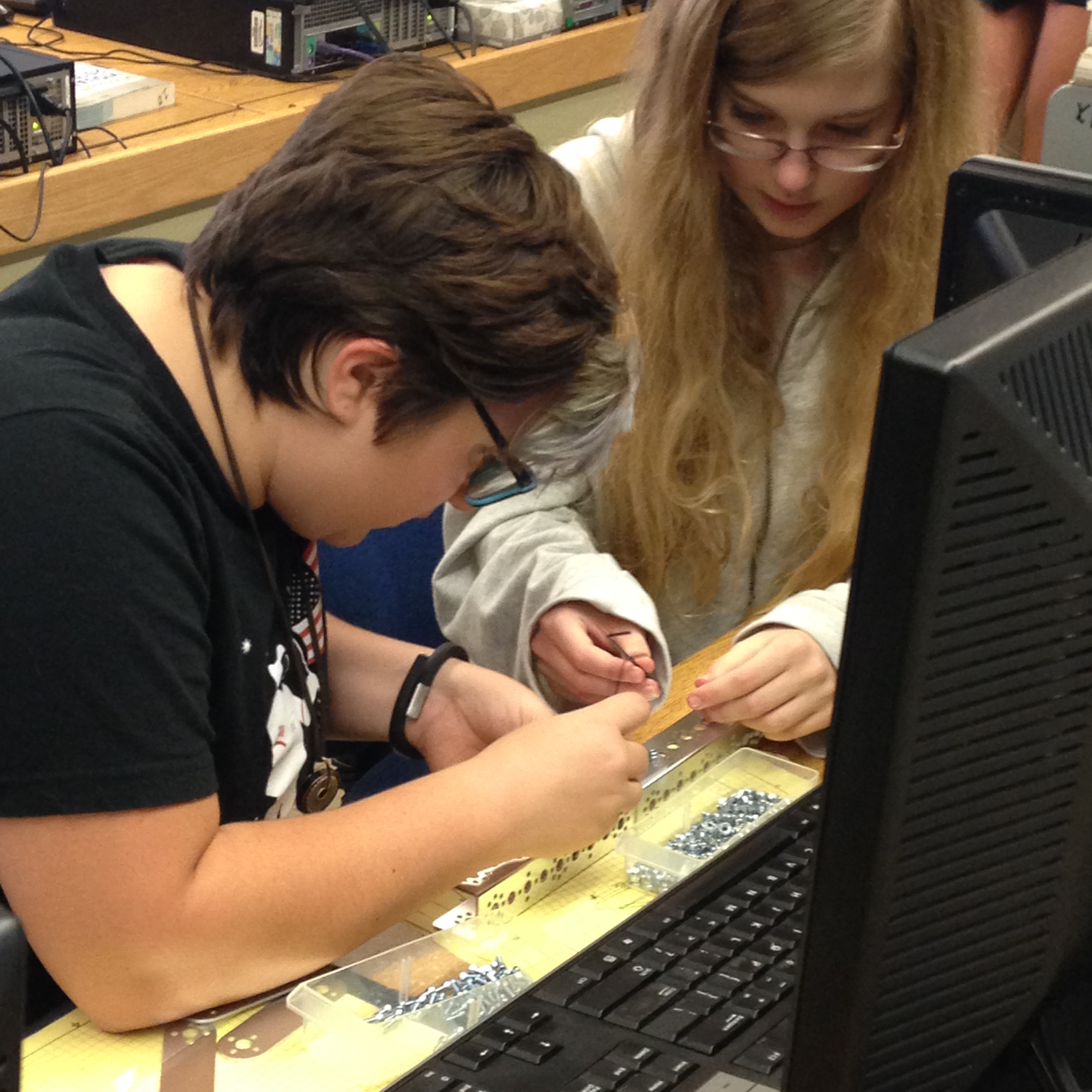
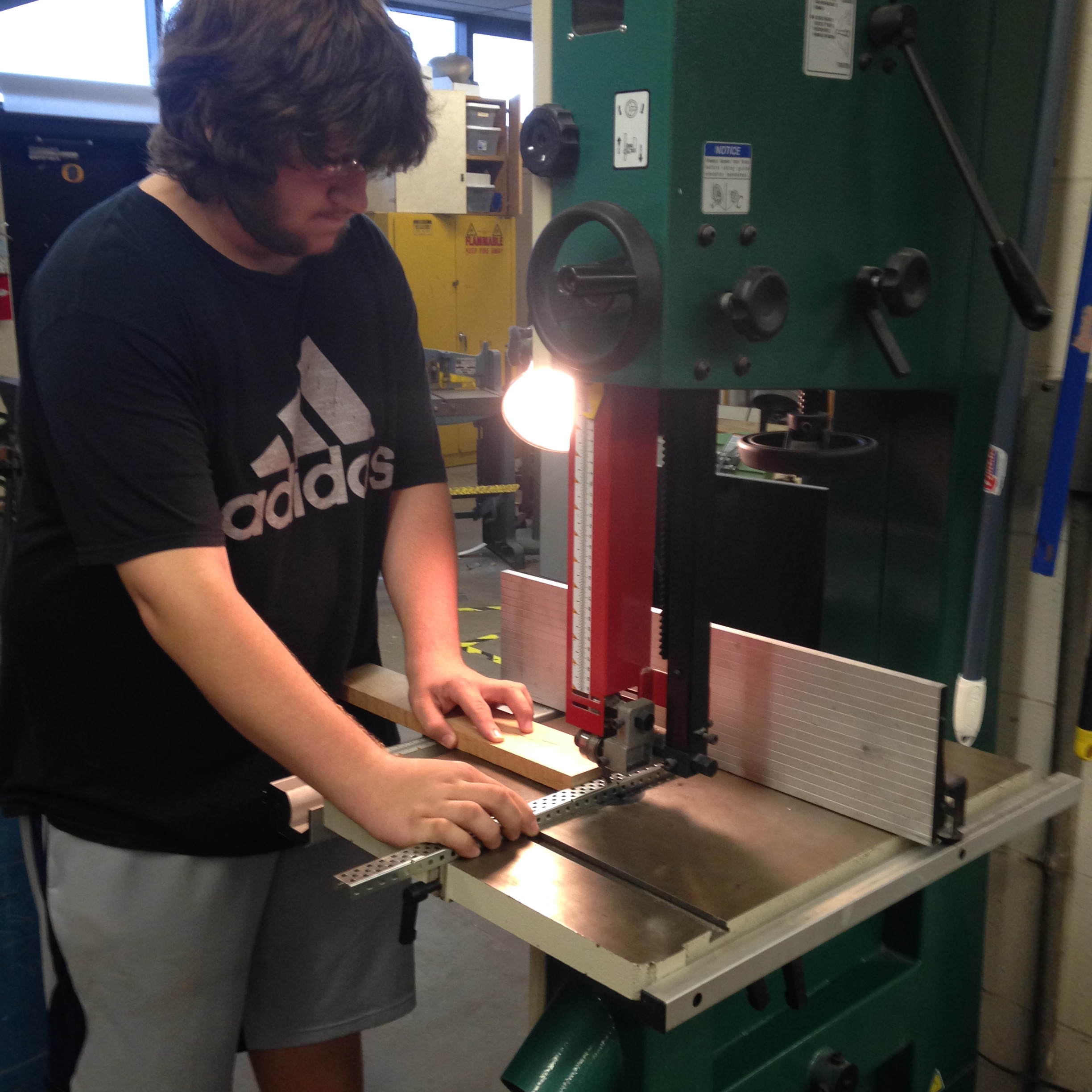
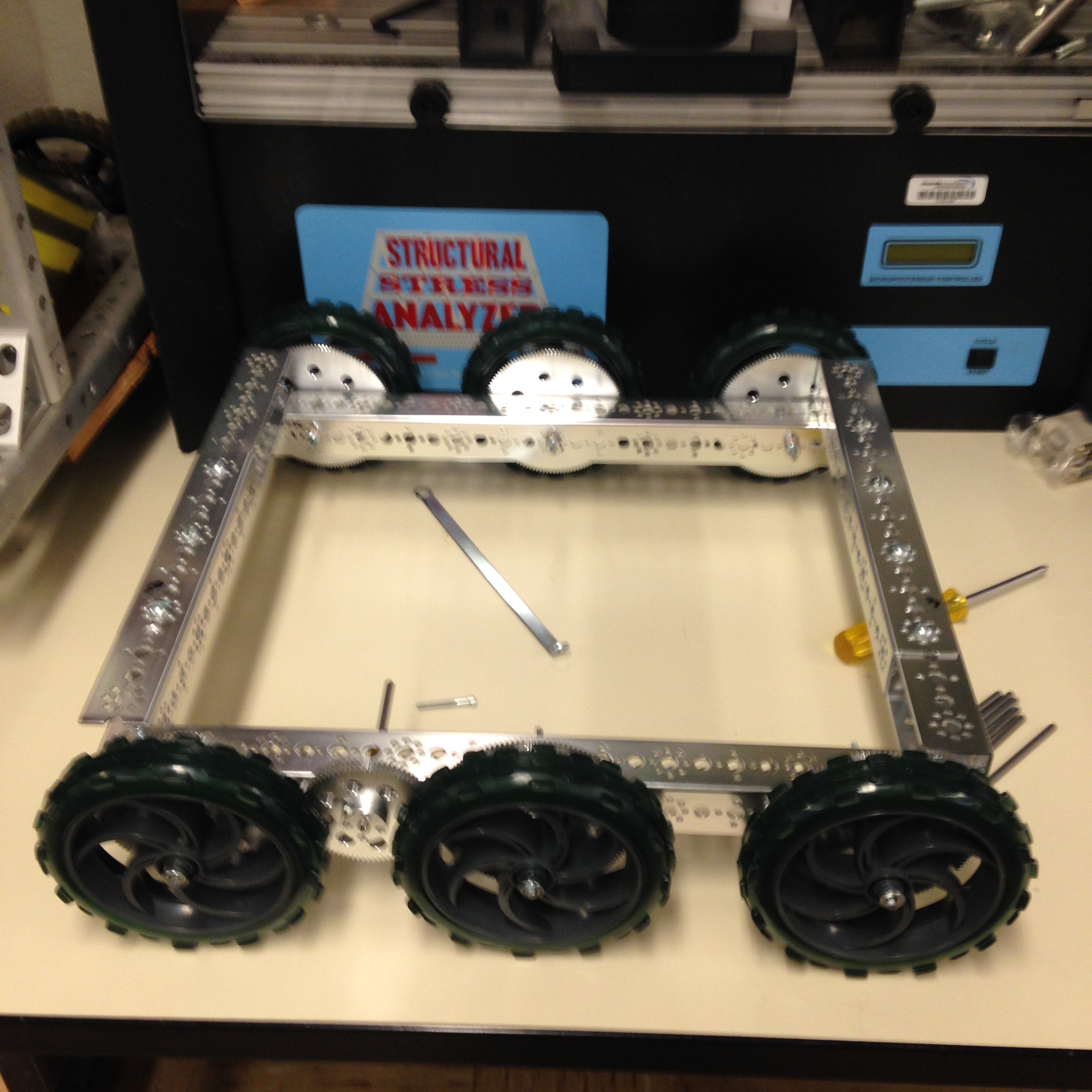
For our base, we made a rectangle out of Tetrix c-channel. We used the longest available pieces for the sides, and for the front and back, Michael bolted together several smaller pieces. Jack and Max put together a wheel and axle assembly, and I calculated how wide the front and back could be in order to fit within the 18″ size constraint. Currently, some of us are in the process of attaching the motors to the gears for the wheels, and others are attaching the arm mount.

Speaking of the arm, we’ve settled on a folding design. We will attempt to use Tetrix servos to connect each link to the next. It’s worth noting that we’re not completely confident in the servos’ ability to lift the robot off the ground, so we’re looking into alternative options in case we need them. For now, the plan is to have two identical arms working at the same time, connected at the far end with a stick. On that stick, we will attach a carabiner, which will clip onto the cliff bar on the playing field. When the arms fold back up, the robot should be pulled off of the mountain.
In the coming weeks, we will finish the base and the arm mechanism. We will post another update once we’ve moved on to programming and autonomous functions.