4th Annual Trivia Night
PLEASE JOIN US! Table Sign Ups are Open!.
More Information and links to Registration forms can be found at
— Trivia Night 2026 —
Oakville High School FIRST Robotics Competition Team 8719
More Information and links to Registration forms can be found at
— Trivia Night 2026 —

More Information and links to Registration forms, Sponsors, and Round Sponsorship Information can be found at
— Trivia Night 2025 —
President: Lauren Killingsworth
Vice-President: Andrew Ruzicka
Systems Engineer: Kevin Buss
Electrical/Pneumatics Captain: Ray Meier
Programing Captain: Reid Akers
Mechanical Captain: Robert Shull
President: Jason Buss
Vice-President: Andrew Ruzicka
Secretary: Lauren Killingsworth
Public Relations: Lauren Killingsworth
Media Specialist: Lauren Killingsworth
Electrical Captain: Ray Meier
Mechanical Captain: Kevin Buss
Programing Captain: Ries Brady
Pneumatics Captain: Damir Lipovac
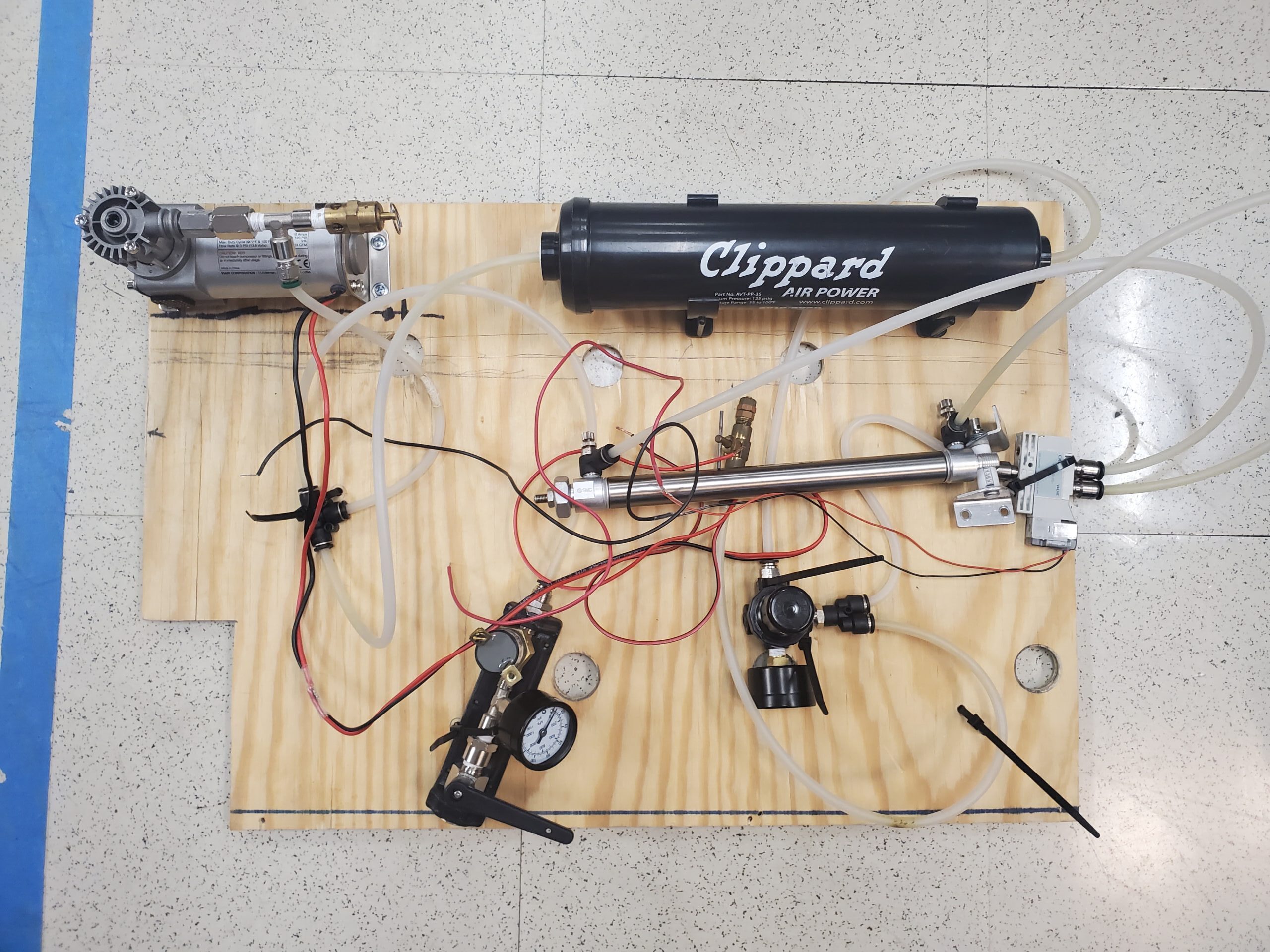
Some of the pictures that have been taken at our build sessions. Exciting Stuff!!





Last Saturday we took a trip to team 1706, Ratchet Rockers, located in Wentzville Missouri. Local teams including us were invited to come and test some robots utilizing the Ratchet Rockers field. This was a wonderful learning experience and a great way test one of our own robot chassis’ on a full scale field. It was great seeing all the different prototypes surrounding schools have and being able to talk about possible game strategies ahead of time.
Find The Cure was a competition we made and held during covid time. Our mentor Dr. James Kreyling made all the game pieces and the challenges we had to do. We invited some nearby schools and teams to participate in the competition. Oakville high school had 1 robot at the competition. Mehlville high school had 3 robots at the competition and then we had Hancock high school come up with 1 robot for the competition. The competition ended up being a mix between FRC and FTC they could make a robot either way, but everyone did FRC-styled bots.
The challenge was pulling a chain and pressing a button. When pressing the button, the goal was to press it as many times as you could in the time frame you were given. There was a 60-second time in between each time you could press it so you couldn’t just sit there and hold the button or spam the button. By pulling the chain
We wanted to do this since covid was going on there were going to be no in-person FRC competitions. They were going to have an in-person FTC competition, but we didn’t want to lose rookie status by signing up for FTC when we wanted to have FRC rookie status. With these things going on we made the decision to make our own competition for people to come to. This is when we came up with the idea of the Find The Cure competition.

Our code from previous years is now public. This used to be tracked with a single flash drive, however with the transition to GitHub and source control, its now available publicly for anyone to view.
There is no version control and there is little documentation in areas, and there is no maintenance done to the code outside of organization and uploading to GitHub.
To view: https://github.com/OakvilleDynamics/ohsrobotics-archive to browse around.
Our other GitHub repos are also generally available!
It’s been awhile since our last post so we wanted to take this time to tell everyone how this year has been starting off. We started off this year with our first meeting on the 23rd of August, where we elected new executives and welcomed our new members. On the 8th of September we learned our new theme for the game this year, which is called Rover Ruckus. This year its completely different than any other year and is the most complex it has been in a long time. The sponsorship and fundraising scene is also different as other years. We’ve planned for different levels of sponsorship based on how much is given. (Those levels will be finalized and posted onto this website later in the Month) Along with a new face to the Sponsorship’s, the teams have been looking into different Colleges and creating part lists for our existing partners to fulfill. In the end, we look to have a great year for Robotics and have a bright future. Till next time!